3D座標架設計
最簡單的作法,以原點出發
1.點O=(0,0)
2.滑桿α,0°~360°
3.滑桿β,0°~360°
4.滑桿 k(長度), 數值1~8,增量1
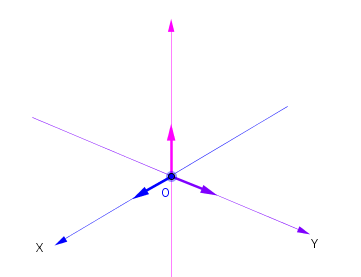
5.向量 u = O + (-sin(α), cos(α) cos(β))
6.向量 v = O + (cos(α), sin(α) cos(β))
7.向量 w = O + (0, sin(β))
8.向量 u2 = Vector[O - k*u, O + k*u] //x軸
9.向量 v2 = Vector[O - k*v, O + k*v] //y軸
10.向量 w2 = Vector[O - k*w, O + k*w] //z軸
當你拖動O點,離開(0,0)時,座標架並不如預期隨O移動,只能將點O隱藏或固定。
Q:如果要將座標架能以O點整個移動,要怎麼做呢?
先插入3個點x1=O + (-sin(α), cos(α) cos(β)) 、y1=O +(cos(α), sin(α) cos(β))、z1=O + (0, sin(β))
修正向量 u = Vector[O, x1] , v = Vector[O, y1] , w = Vector[O, z1] ,
--- OK完成 ---
如果不需要顯示單位向量,更簡單,不必借助x1,y1,z1
改u = (-sin(α), cos(α) cos(β)),v =(cos(α), sin(α) cos(β)),w = (0, sin(β))
把u,v,w隱藏,這三個向量只是輔助工具
進一步做成3維空間,3D座標表示:
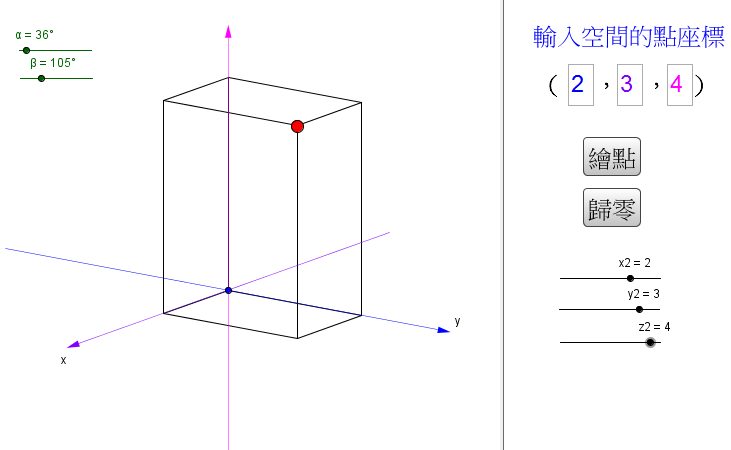
Q:如何讓文字黏在X軸點,旋轉不會脫離?
文字屬性設定位置,起點O+k*u(長度)即可
Q:如何做一個正立方體,以O為中心,2k為邊長?
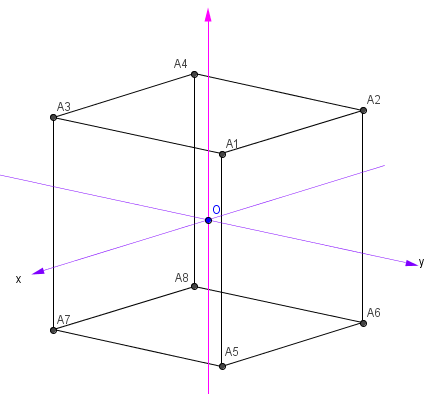
先做八個端點,再連線段
A1=O + k u + k v + k w
A2=O - k u + k v + k w
A3=O + k u - k v + k w
A4=O - k u - k v + k w
A5=O + k u + k v - k w
A6=O - k u + k v - k w
A7=O + k u - k v - k w
A8=O - k u - k v - k w